Práctica L298N
Está práctica consistirá en invertir el sentido de giro de un motor DC con el módulo L298N. Comenzando con un giro a la derecha y después a la izquierda.
- Código
Iniciaremos declarando los pines donde estarán conectados las patillas IN1 y IN2 al Arduino.
Usaremos dos variables de tipo entero para declarar esos pines, también se pueden definir usando #define.
int IN1 = 10;
int IN2 = 9;
En la función setup() definiremos como salidas los tres pines digitales iniciados anteriormente.
Void setup(){
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
}
En la función loop() agregaremos las instrucciones para mandar los pulsos eléctricos al módulo para habilitar al motor y para hacerlo girar de derecha a izquierda.
Si mandamos un LOW a IN1 y un HIGH a IN2, el motor empezará a girar a la derecha. En cambio, si se manda un HIGH a IN1 y un LOW a IN2, el motor girará a la izquierda.
Void loop(){
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
delay(5000);
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
delay(1000);
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
delay(5000);
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
delay(1000);
}
-Instrumentación
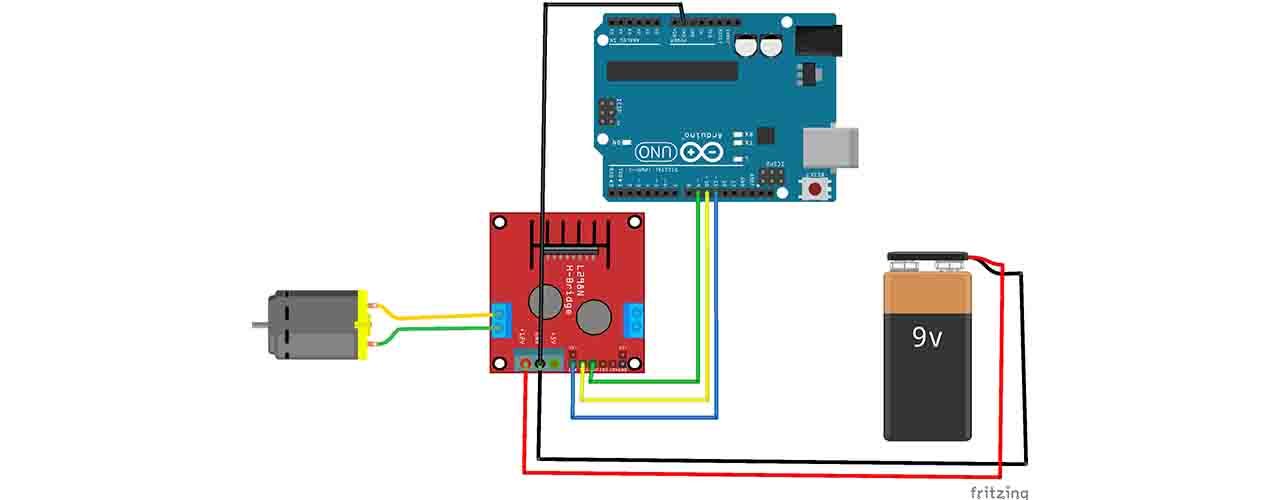
Para montar el circuito para el código anterior se necesita: 1 Arduino UNO, 1 modulo L298N, una fuente de alimentación de 6v, 7.5v o 9v, 1 Protoboard (opcional) y Jumpers macho-hembra.
Comenzaremos conectado el motor DC a la bornera correspondiente al motor A (usualmente es el de la izquierda teniendo las patillas de entrada de frente). Al no tener polaridad el motor, puedes conectarlo de la forma que gustes.
Usaremos 3 jumpers para realizar la conexión de las 3 patillas que controlan al motor A, ENA, IN1 y IN2. Para conectar ENA, es necesario retirar el jumper que tiene. Puedes quitar también el otro jumper del motor B para futuros proyectos.
Una vez terminado las conexiones del motor, procedemos a conectar la alimentación. En este caso usaremos una batería de 9v.
Conectamos primeramente las tierras del Arduino, del módulo y de la batería, uniéndolas creando una tierra común. Solo alimentaremos el módulo L298N con la pila, para energizar el Arduino se usará el cable de datos conectado al computador.
Acto seguido, añadimos el cable positivo a la bornera de 12v. Como no rebasamos los 12v, no es necesario retirar el jumper regulador de tensión. Cargamos el programa y termina la práctica.
Imágenes