Práctica servomotor
Está práctica consistirá en que el servomotor haga un barrido de 0° a 180° y de 180° a 0° cada 20 milisegundos.
- Código
Para iniciar, comenzaremos incorporando la librería para el manejo del servomotor. Para incluirla nos dirigimos a la barra de herramientas “Programa”, en la sección “Include Library” y en la opción “Servo”.
Se añadirá la librería externa para poder controlar el servo
#include
Para identificar a nuestro servomotor necesitamos declarar una variable, lo llamaremos servo1 por ser el primero y declararemos un variable de tipo entero para almacenar los grados del servomotor.
Servo ServoMotor1;
Int posicion;
En la función setup() se iniciará el puerto serial y se definirá el pin digital PWM donde estará conectado el pin SIG del servomotor.
Void setup(){
Serial.begin(9600);
ServoMotor1.attach(9);
}
En la función loop() agregaremos las instrucciones para aumentar el valor de posición para ver el movimiento del servomotor. Cada movimiento le podremos un delay de 20 milisegundos.
Void loop(){
for (posicion = 0; posicion <= 180; posicion += 1)
{
ServoMotor1.write(posicion);
delay(20);
}
for (posicion = 180; posicion >= 0; posicion -= 1)
{
ServoMotor1.write(posicion);
delay(20);
}
}
La instrucción .attach es para declarar el pin PWM donde estará conectado el cable de datos del servomotor y .write es para mover el servo al angulo establecido.
-Instrumentación
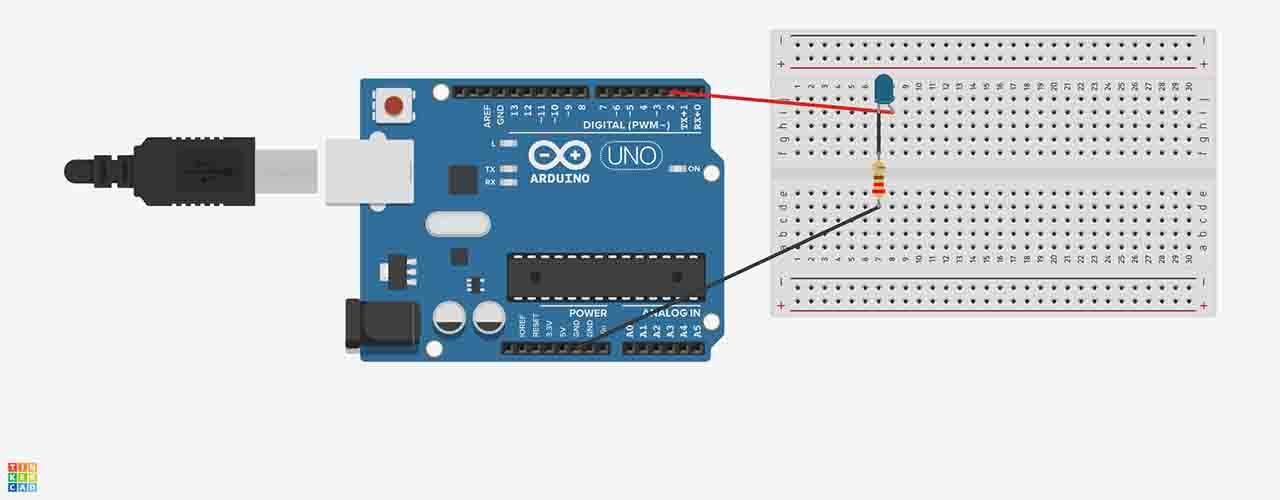
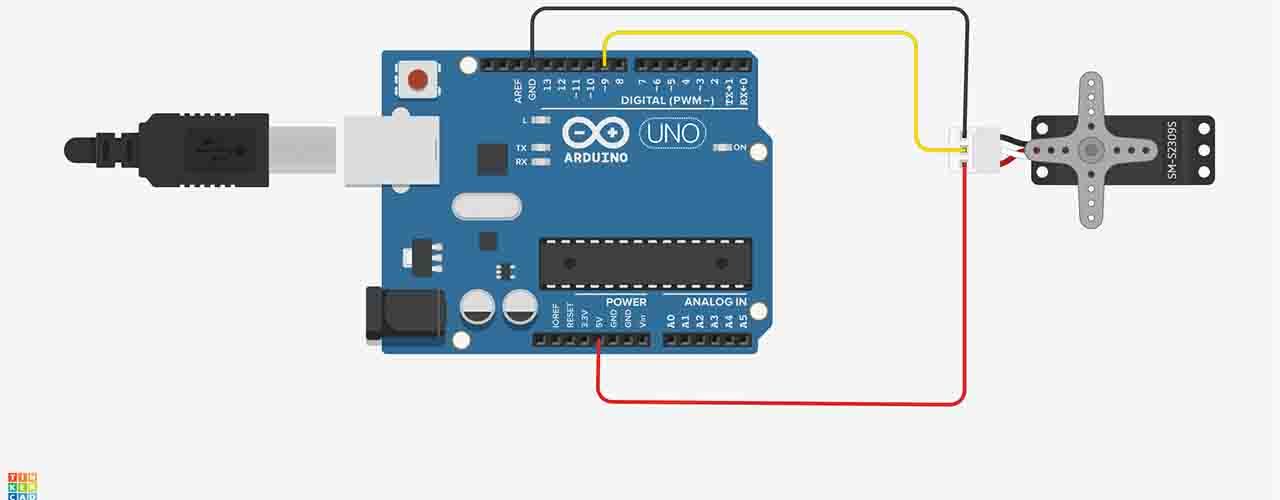
Para montar el circuito para el código anterior se necesita: 1 Arduino UNO, 1 servomotor (SG90, por ejemplo),1 Protoboard (opcional) y Jumpers macho-macho.
Conectaremos los pines de alimentación del servomotor a los pines 5v y GND del Arduino para poder energizar al componente, puedes conectarlos directamente a la placa Arduino o hacer puentes de conexión en la protoboard.
El pin de datos del servo lo conectaremos al pin 9 porque es un pin digital PWM, podemos destacarlo por la línea ondeada junto del número. Terminamos la conexión con la unión del pin de datos y ejecutamos el programa.
Imágenes