INVERTIR el GIRO de un MOTOR DC con ARDUINO
Video
Está práctica aprenderemos a controlar el giro de un motor DC utilizando un L298N y un pulsador. Al momento de pulsar el botón, un Arduino UNO invertirá el giro del motor.
¿Cómo INVERTIR el GIRO de un MOTOR DC con ARDUINO? ▶ L298N y un PULSADOR
- Materiales:
Para realizar el circuito necesitas:
• 1 Arduino UNO,
• 1 Módulo L298N,
• 1 Motor DC,
• 1 Fuente de alimentación 12v,
• 1 pulsador,
• 1 resistencias de 1k ohms,
• 1 protoboard y jumpers.
- Código
Iniciaremos el programa inicializando y declarando las variables y constantes necesarias para que funcione nuestro código.
#define BUTTON 8
#define IN1 9
#define IN2 10
bool statusSpin = 0;
bool statusButton = 0;En la función setup() solo se definirá los pines del L298N como salidas y el botón como entrada.
void setup() {
pinMode(BUTTON,INPUT);
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
}En el void loop guardamos en la variable destinada al estado del botón dicho estado con la función digitalRead().
Después, usando una condicional “if” checamos si el pulsador está presionado para cambiar el valor de la variable statusSpin, encargada de cambiar el giro del motor.
Para finalizar, usamos otro condicional “if” para mandar los pulsos correspondientes al driver L298N que hará girar de un lado o del otro al motor DC.
void loop() {
statusButton = digitalRead(BUTTON);
if(statusButton==HIGH){
statusSpin = !statusSpin;
}
if(statusSpin == 1){
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
} else {
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
}
delay(150);
}- Instrumentación
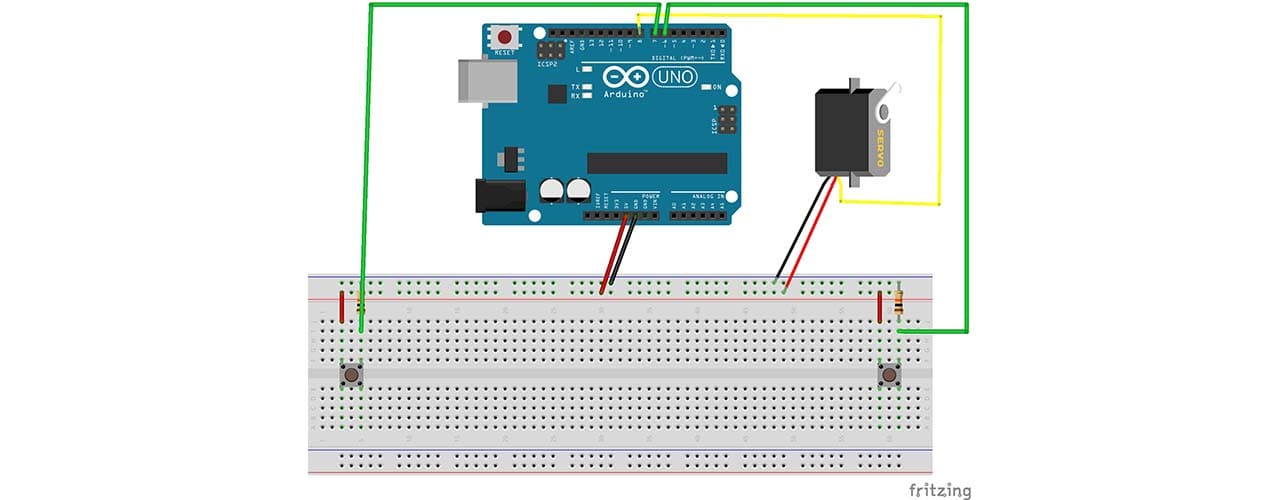
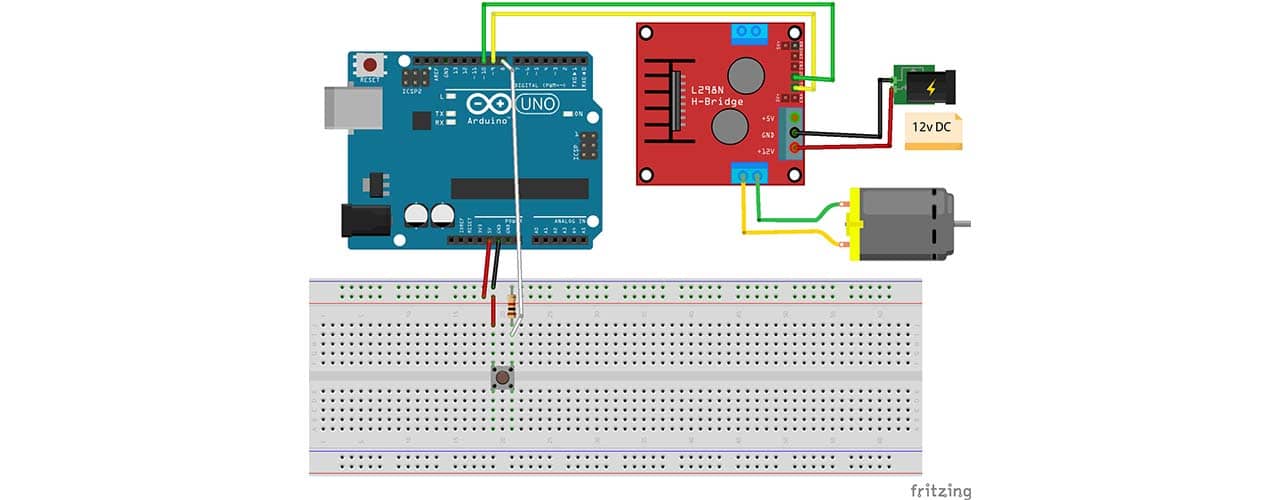
Colocaremos primero el pulsador. El pulsador lo pondremos en un extremo de la protoboard. En el pulsador, conectaremos una de las patas a 5v y el otro haremos un nodo donde estará una pata de la resistencia de 10k y el puente donde lo conectaremos al pin digital de Arduino. El extremo que falta por conectar de la resistencia lo pondremos en GND.
Puenteamos el pin de 5v del Arduino a la línea Vcc y GND a la línea de tierra de la protoboard para alimentar al pulsador.
Conectamos a las entradas del MOTOR A del L298N al motor DC, y enlazamos con jumpers IN1, IN2 a los pines digitales del Arduino. Finalizamos la instrumentación colocando la fuente de alimentación 6v-12v al módulo L298N.
DESCARGAS
SIMULA EL MULTITASKING EN ARDUINO CON MILLIS
Imágenes
APRENDE LO QUE NECESITAS
NUESTROS CURSOS

Creación de un HMI en Android Studio y Arduino
Nivel: Básico 2 horas y 30 min (146 min.)
Diseña, maqueta y programa un HMI completo en Android Studio vinculado a un Arduino mediante Bluetooth.
CONSTRUYE un DISPENSADOR AUTOMÁTICO CASERO sin ARDUINO desde CERO
Nivel: Básico 27 minutos
Construye desde cero un dispensador automático casero sin Arduino desde cero, utilizando pura electrónica.

Creación de carrito robot desde cero usando mando de PS4
Nivel: Básico 2 horas y 19 min (139 min.)
Construye desde cero un carrito robot con arduino manipulado por un control de PS4 y un teléfono Android.
¿Tienes un proyecto que quieras compartir?
Mándanos tu proyecto o prácticas que quisieras difundir en la comunidad a nuestras redes.
ó
team@codiziapp.com