COMO CONTROLAR VELOCIDAD de un MOTOR DC CON L298N
Video
Está práctica aprenderemos a controlar la velocidad de un motor DC utilizando un L298N. Disminuiremos o aumentaremos las revoluciones del motor usando pulsadores y un Arduino UNO.
¿Cómo CONTROLAR la VELOCIDAD de un MOTOR DC con ARDUINO? ▶ L298N con PULSADORES
- Materiales:
Para realizar el circuito necesitas:
• 1 Arduino UNO,
• 1 Módulo L298N,
• 1 Motor DC,
• 1 Fuente de alimentación 12v,
• 2 pulsadores,
• 2 resistencias de 1k ohms,
• 1 protoboard y jumpers.
- Código
Iniciaremos el programa inicializando y declarando las variables y constantes necesarias para que funcione nuestro código.
#define BUTTONRIGHT 7
#define BUTTONLEFT 8
#define IN1 9
#define IN2 10
#define ENA 11
int speedMotor = 255;
bool statusLeft;
bool statusRight;
En la función setup() se definirá los pines del L298N como salidas y los botones como entrada. Ahí mismo encenderemos el motor usando digitalWrite en los pines del puente H.
void setup() {
pinMode(BUTTONRIGHT, INPUT);
pinMode(BUTTONLEFT, INPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENA, OUTPUT);
//encender motor
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
}En el void loop guardamos en las variables destinadas a los estados de los botones, guardamos dicho estado con la función digitalRead().
Después, usando condicionales “if” checamos cuál de los dos pulsadores está presionado para aumentar o disminuir la velocidad del motor.
Recuerda que con analogWrite podemos regular el pulso PWM.
void loop() {
statusRight = digitalRead(BUTTONRIGHT);
statusLeft = digitalRead(BUTTONLEFT);
if(statusLeft == HIGH){
if(speedMotor <= 0){
speedMotor = 0;
}else{
speedMotor = speedMotor - 5;
}
}
if(statusRight == HIGH){
if(speedMotor >= 255){
speedMotor = 255;
}else{
speedMotor = speedMotor + 5;
}
}
analogWrite(ENA, speedMotor);
delay(150);
}-Instrumentación
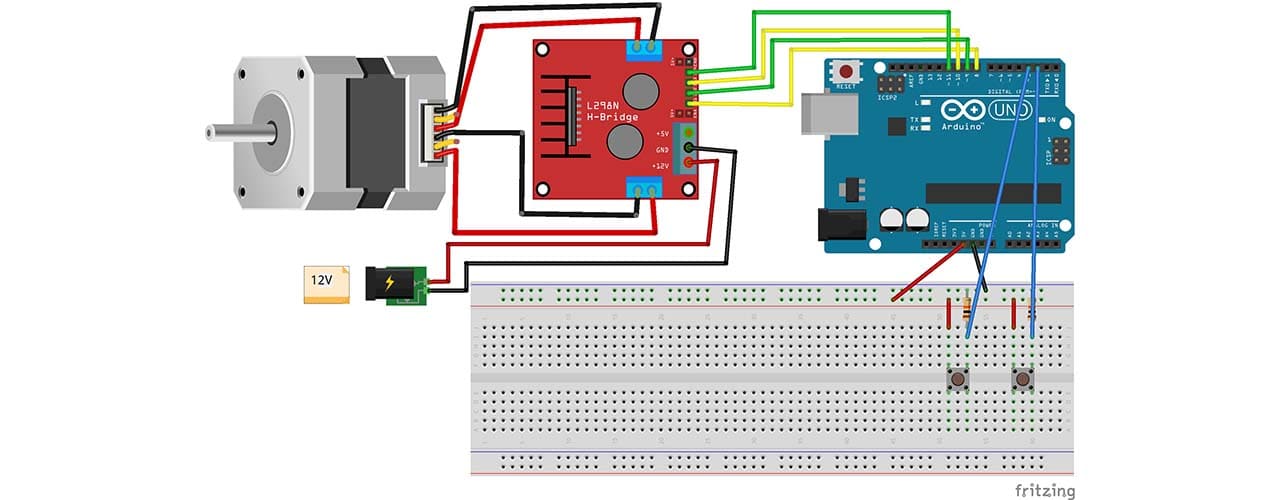
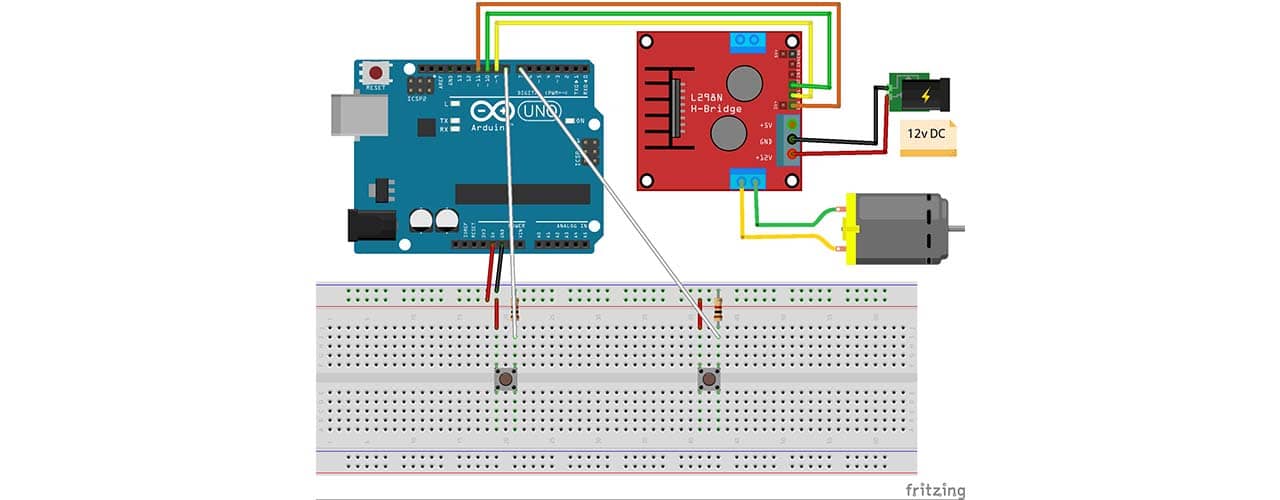
Colocaremos primero los pulsadores. Los pulsadores los pondremos en un extremo de la protoboard. En cada pulsador, conectaremos una de las patas a 5v y el otro haremos un nodo donde estará una pata de la resistencia de 10k y el puente donde lo conectaremos al pin digital de Arduino. El extremo que falta por conectar de la resistencia lo pondremos en GND.
Puenteamos el pin de 5v del Arduino a la línea Vcc y GND a la línea de tierra de la protoboard para alimentar los pulsadores.
Conectamos a las entradas del MOTOR A del L298N al motor DC, y enlazamos con jumpers IN1, IN2 a los pines digitales del Arduino. Finalizamos la instrumentación colocando la fuente de alimentación 6v-12v al módulo L298N.
DESCARGAS
COMO CONTROLAR VELOCIDAD DE UN MOTOR DC CON L298N Y ARDUINO
Imágenes
APRENDE LO QUE NECESITAS
NUESTROS CURSOS

Creación de un HMI en Android Studio y Arduino
Nivel: Básico 2 horas y 30 min (146 min.)
Diseña, maqueta y programa un HMI completo en Android Studio vinculado a un Arduino mediante Bluetooth.
CONSTRUYE un DISPENSADOR AUTOMÁTICO CASERO sin ARDUINO desde CERO
Nivel: Básico 27 minutos
Construye desde cero un dispensador automático casero sin Arduino desde cero, utilizando pura electrónica.

Creación de carrito robot desde cero usando mando de PS4
Nivel: Básico 2 horas y 19 min (139 min.)
Construye desde cero un carrito robot con arduino manipulado por un control de PS4 y un teléfono Android.
¿Tienes un proyecto que quieras compartir?
Mándanos tu proyecto o prácticas que quisieras difundir en la comunidad a nuestras redes.
ó
team@codiziapp.com