Práctica motor a pasos de 6 hilos
En esta práctica programaremos un control que realice un giro positivo y un giro negativo para un motor a pasos de 6 cables/hilos usando el módulo L298N y un Arduino UNO.
- Materiales:
Para realizar el circuito necesitas:
• 2 pulsadores,
• 2 resistencias de 10k,
• 1 fuente de alimentación entre 6v y 12v,
• 1 módulo puente h L298N,
• 1 motor a pasos de 6 cables/hilos (STH-39D1976021204, Shinano Kenshi),
• 1 Protoboard y Jumpers.
- Código
Para encontrar el programa tenemos que dirigirnos a la pestaña de Archivo, luego Ejemplos-> Stepper->stepper_oneRevolution.
Nos abrirá un código creado por Tom Igoe donde incluye la librería Stepper.h, para poder manipular el motor a pasos correctamente.
Al inicio del programa modificaremos los stepsPerRevolution acorde a nuestro motor, en esta práctica lo dejaremos en 200.
#include
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
En la inicialización de Stepper no modificaremos nada.
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
Dentro del void setup() establecemos la velocidad del motor, está debe estar acorde con los rpm del motor, si no, no funcionará bien el código.
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(300);
// initialize the serial port:
Serial.begin(9600);
}
En la función loop() no modificaremos nada tampoco, ya que en la funciones myStepper.step(), dentro de los paréntesis viene la variable stepsPerRevolution, el cual ya fue modificado. Para esta práctica tuvimos que borrarla para agregar el valor de 1250 para que el motor pudiera realizar la vuelta completa.
void loop() {
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(1250);
delay(500);
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-1250);
delay(500);
}
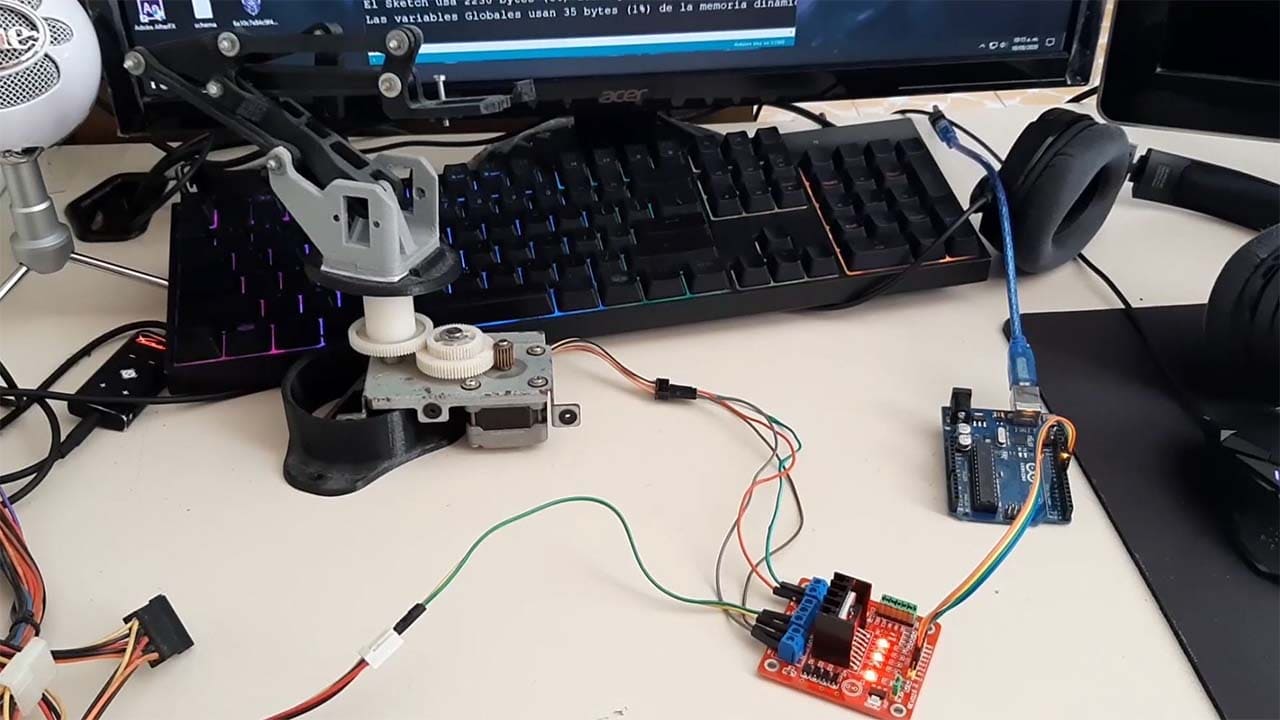
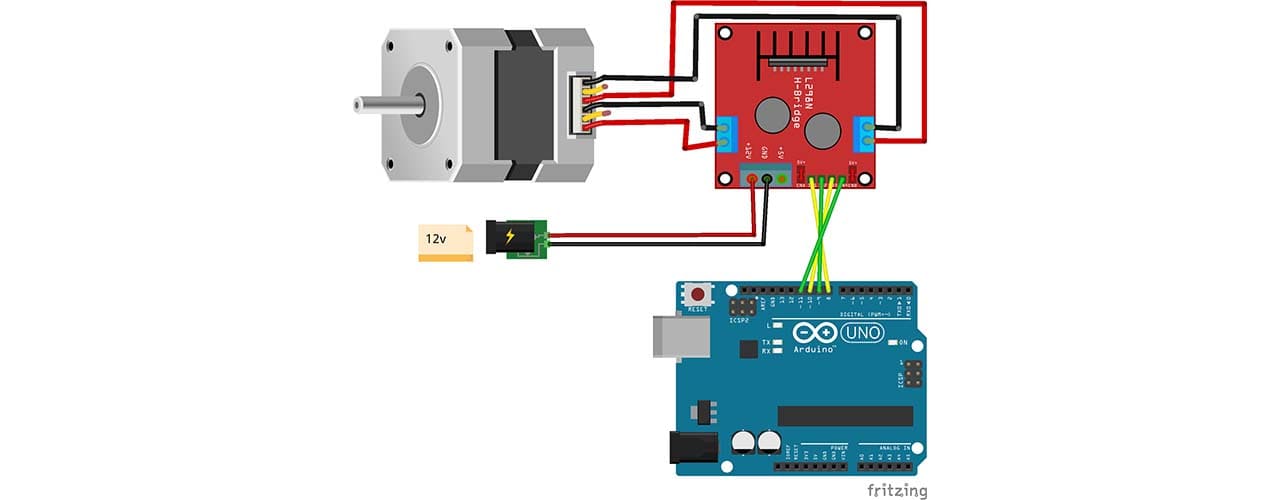
Instrumentación
Conectamos a las entradas del MOTOR A y MOTOR B del L298N las bobinas principales del motor a pasos, dejando sin conectar los comunes y enlazamos con jumpers IN1, IN2, IN3, IN4 a los pines digitales 8, 9,10 y 11 del Arduino. Finalizamos la instrumentación colocando la fuente de alimentación 6v-12v al módulo L298N.
Imágenes